
2022年12月14日,受聊城大学智能分析与优化控制创新团队邀请,国家级高层次人才、冈山县立大学教授忻欣老师作了关于“Controllability and Observability of an n-Link Underactuated Planar Robot with Different Actuator-Sensor Configurations”的学术报告。本次报告以腾讯会议的形式举行,由数学科学学院朱成龙老师主持,复杂系统智能分析与优化控制创新团队的老师和研究生在线上参加了本次报告会。
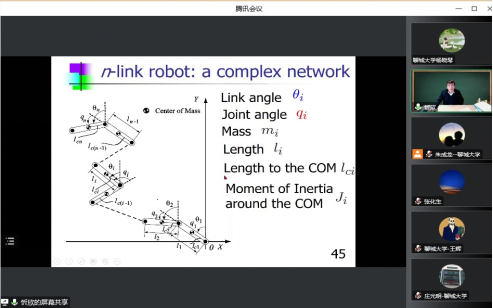
忻欣教授提到,复杂网络的可控性和可观测性是一个非常热门的话题,研究如何在驱动节点最少的情况下控制复杂网络是一个有趣的问题。本次报告以在同一垂直平面上运动的n-连杆欠驱动转动平面机器人为研究对象,对复杂网络的可控性和可观性问题展开讨论。此外,忻欣教授还基于带有中间主动关节的机器人和带有多个执行器和编码器的机器人给出了线性可控性和可观性的研究内容和结果。
报告结束后,在场老师和同学们对忻欣教授表达了感谢,并与其展开热烈的学术交流与探讨。忻欣教授报告内容生动丰富,使大家对n-连杆欠驱动平面机器人这类复杂系统的可控性和可观察性问题有了更加深入的认识。
忻欣,1987年毕业于中国科学技术大学,获工学学士学位;1993 年毕业于东南大学,获工学博士学位;2000年获日本东京工业大学博士(工学)学位。1996-1997年为日本新能源产业技术综合开发机构(NEDO) 最先端领域技术研究员,2008年至今为网山县立大学教授。曾任该校计算机和系统工程学院长助理,国际交流中心副主任,现任系统工程系主任。研究领域包括欠驱动机械人系统的非线性控制理论和实验验证、鲁棒控制及其在机器人控制中的应用,复杂系统的建模与控制及在能源系统中的应用。在IEEE Transactions on Automatic Control、IEEE Transactions on Robotics、Automatica等SCI期刊和国际学术会这上上发表论文220多篇,出版专著6部。获得了日本国家科学研究基金项目6项(主持人),以及日本的3个财团的研究基金项目5项(主持人)的资助,获2004年日本计测与自动控制学会(SICE)控制部门大会奖。曾任日本计测与自动控制学会论文杂志,日本机器人学会论文杂志等杂志的副编,现任为IEEE Control Systems Letters的副编。